首页
产品资料
空间建构机器人
刷卡编程机器人
图形化编程机器人
硬件使用
单片机主控板(CPU)
红外遥控器发射
红外遥控器接收
2.4G遥控发射V2
2.4G遥控接收V2
LED灯模块
全彩LED
蜂鸣器
点阵板模块
液晶显示模块
红外传感器(可调)
红外传感器(不可调)
灰度传感器(竞赛)
触碰传感器
光敏传感器
火焰传感器
温度传感器
电位器V3.0
热敏传感器
超声波模块
主控板(cpu)使用说明
伺服马达
两线直流马达
三线直流马达
软件使用
关于编程软件
图形化编程机器人编程软件下载
编程软件界面使用说明
开始
程序开始
定时器
定时器 -- 定时器开始
定时器 -- 定时器设置
定时器 -- 打开定时器
定时器 -- 关闭定时器
定时器 -- 拓展
感知
触碰传感器
声音传感器
红外传感器
红外遥控器(1)
红外遥控器(2)
2.4G遥控器(1)
2.4G遥控器(2)
2.4G遥控器(3)
2.4G遥控器(4)
电位器
火焰传感器(1)
火焰传感器(2)
热敏传感器(1)
热敏传感器(2)
光敏传感器(1)
光敏传感器(2)
霍尔传感器
震动传感器
烟雾传感器(1)
烟雾传感器(2)
酒精传感器(1)
酒精传感器(2)
可燃气体传感器(1)
可燃气体传感器(2)
土壤湿度传感器(1)
土壤湿度传感器(2)
温湿度传感器(1)
温湿度传感器(2)
DS18B20温度传感器
射频识别模块简介(一)
射频识别模块(1)
射频识别模块(2)
射频识别模块(3)
获取CPU电压-1
获取CPU电压-2
运动
板载LED
LED模块(1)
LED模块(2)
蜂鸣器模块
两线制马达
三线制马达
伺服马达
全彩LED(1)
全彩LED(2)
全彩LED(3)
全彩LED(4)
点阵板
数码管(1)
数码管(2)
数码管(3)
数码管(4)
蓝牙音频模块
OLED模块(1)
OLED模块(2)
OLED模块(3)
OLED模块(4)
OLED模块(5)
OLED模块(6)
射频识别模块简介(二)
射频识别模块(4)
射频识别模块(5)
射频识别模块(6)
控制
如果
重复执行
重复执行(2)
重复执行(3)
等待块
for循环
跳出循环
注释
运算
数字输入框
逻辑运算
算数运算和位运算
大小比较
函数
延迟xS
延迟xmS
延迟xuS
随机数
串口打印
串口初始化
串口打印文字
串口打印数字
串口U1-U3
串口Ux初始化
串口Ux发送数据
映射输出
定义
变量定义
版本更新信息
系统资料
办公系统
瓦力云
问题集锦
系统问题
产品问题
其他问题
测评比赛
瓦力云
瓦力官网
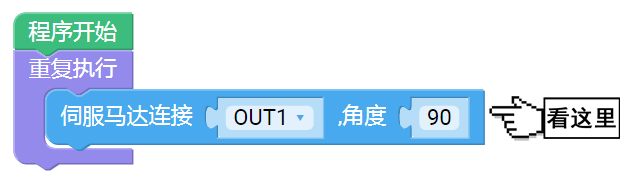
伺服马达
图形块样式
介绍
控制伺服马达的角度状态。
可控制伺服马达定位到某一个角度确定的位置上。
角度从0-180的整数可调。
代码块第一个选项用来选择伺服马达的接线引脚,第二个选项用来选择伺服马达的定位角度。
对应C语言代码
ServoAngle
(
OUT1
,
(
90
)
)
;
示例
此代码块效果
:控制接在OUT1引脚上的伺服马达转到90度位置。
示例程序效果
:控制接在OUT1引脚上的伺服马达转到90度位置.。
注意
伺服马达的角度位置的确定——以伺服马达为原点的极坐标系上,角度坐标对应的位置。
伺服马达一般用来进行某一重复的动作控制(例如瓦力小车的抓夹机构的控制)!
实物图
返回顶部